Autonomní roboti řízení umělou inteligencí nabídli unikátní pohled do nitra včelstva. Pomocí kamer sledovali matku s doprovodem a generovali velké soubory dat pro analýzu chování včel. Dělo se tak v rámci projektu H2020 FET-OPEN „RoboRoyale“ (https://roboroyale.eu). Projekt začal v listopadu roku 2021 a potrvá do října roku 2026. Nyní výzkumníci uvolnili zatím dosažené výsledky, a především popsali mechanismus robotického sledování včel za využití AI.
Charakteristika použité technologie
Vědci z Centra umělé inteligence Fakulty elektrotechnické Českého vysokého učení technického v Praze s kolegy z Rakouska, Velké Británie a Turecka vyvinuli průlomovou technologii pro výzkum chování sociálního hmyzu. Jejich autonomní roboti, umístění ve výzkumném zařízení pro včely medonosné na univerzitě ve Štýrském Hradci, generují denně 1 400 GB dat.
Tato data obsahují snímky matky a její interakce s dělnicemi. Vše probíhá nepřetržitě v reálném čase ve vysokém rozlišení. Robotický systém snímky automaticky analyzuje a měří řadu veličin charakterizujících činnost matky a zdraví včelstva.
Publikace v Science Robotics
V článku „Autonomous tracking of honeybee behaviors over long-term periods with cooperating robots“, publikovaném v letošním říjnovém čísle renomovaného časopisu Science Robotics, Jiří Ulrich a jeho spoluautoři představují prozatímní výsledky.
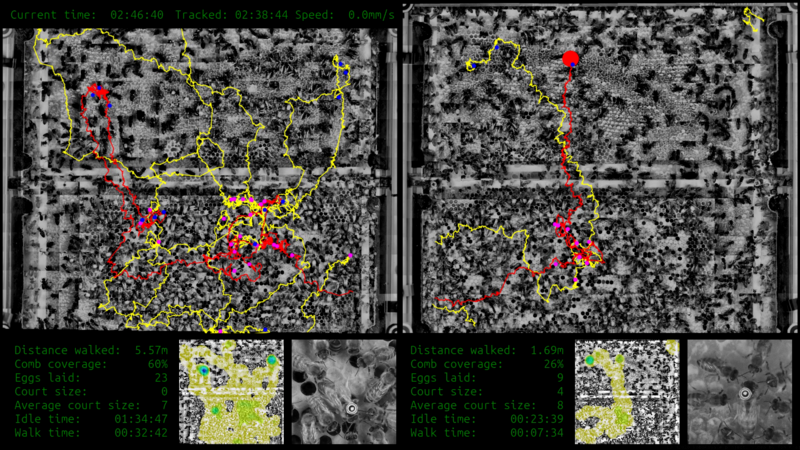
Robotický systém poprvé umožnil získat přesný, dlouhodobý a nepřetržitý sběr relevantních dat o včelstvu. Všestrannost tohoto zařízení vědci dokazují na příkladu 23 různých parametrů, které systém ze snímků dokáže získávat, a zdůrazňují, že v průběhu projektu RoboRoyale budou přibývat další analýzy.
Schopnosti robotického systému
Robotický systém umí automaticky zjišťovat:
· pokrytí plástve matkou;
· typický tvar trajektorie matky, její pozici, orientaci a rychlost;
· vzdálenost nachozenou matkou za jednotku času;
· délku aktuálního a minulých odpočinků matky;
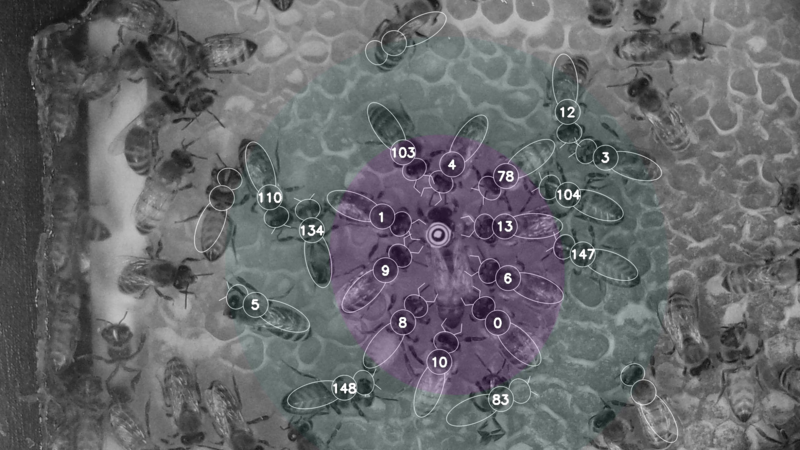
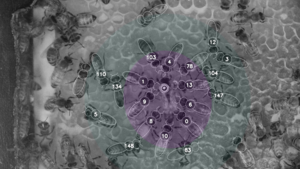
· počet doprovodných včel interagujících s matkou;
· celkovou populaci úlu a její hustotu;
· hustotu dělnic v okolí matky a jinde;
· pozici, orientaci a rychlost dělnic;
· čas strávený péčí o matku danou dělnicí;
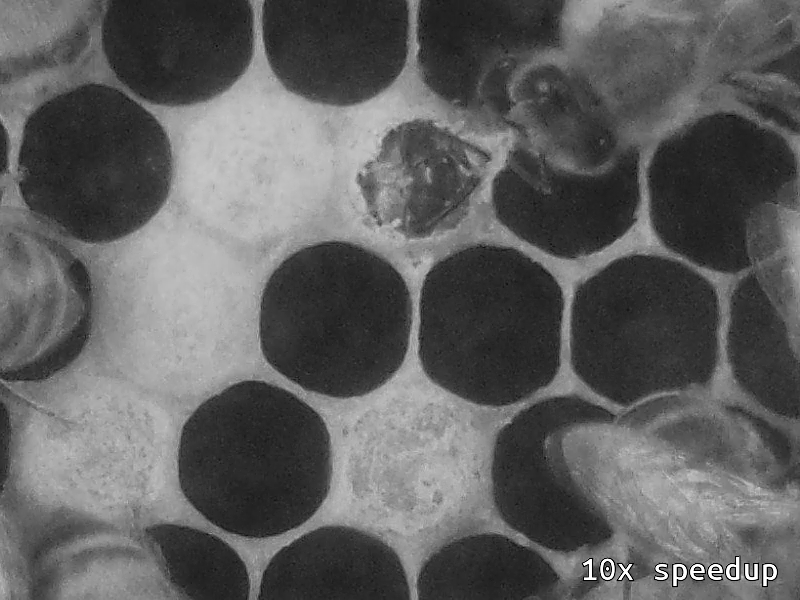
· pozici a čas nakladených vajíček, počet nakladených vajíček za jednotku času, hustotu nakladených vajíček;
· vývoj dané oblasti plástu.
Poloautomatický robotický systém umí zachytit:
· krmení matky;
· čištění matky;
· trophylaxi;
· přípravu buněk pro nová vajíčka dělnicemi;
· počet a pozici vajíček;
· počet, pozici a stáří larev;
· krmení larev dělnicemi;
· úspěšnost a neúspěšnost vývoje dané larvy;
· inspekci buněk matkou a dělnicemi.
Výběr nově získaných zjištění
Článek představuje první překvapivá zjištění o chování včel. Matka pozorovaná v této studii například urazila za měsíc vzdálenost cca 1,5 kilometru na dvou plástech o rozměrech 42 x 33 cm. Upřednostňovala odpočinek na určitých místech po dobu až 1,5 hodiny. Ještě v doznívající včelí sezóně v říjnu kladla v průměru 187 vajíček denně.
Použitá metodika
Robotický systém byl postaven kolem plně funkčního včelstva v pozorovacím úlu, který umožňoval přirozené chování včel. Jádrem systému byly dvě mobilní kamerové hlavy, které se o práci dělily autonomně, tj. bez povelu od lidského operátora. Pokud se matka pohybovala, roboti ji doprovázeli. Také když přecházela na opačnou stranu plástu, roboti spolupracovali a společně zajistili její nepřetržité sledování. Když systém vyhodnotil, že se matka chystá odpočívat, první kamera nadále pozorovala včely, které ji ošetřovaly, zatímco druhá kamera prohlížela plásty, na nichž počítala dělnice a pořizovala snímky plástu.
Kamery využívaly infračervené světlo, aby nedocházelo k ovlivňování chování včel, protože včely červené světlo nevidí.
Souhrn
Záznamy ve vysokém rozlišení vědci zpracovávali pomocí pokročilých metod počítačového vidění. Během jednoho měsíce studie systém zpracoval více než 100 milionů snímků. Toto množství je prakticky nemožné analyzovat ručně.
Mezinárodní tým složený z výzkumníků Českého vysokého učení technického v Praze, britské Durhamské univerzity, Univerzity ve Štýrském Hradci a Středovýchodní technické univerzity v turecké Ankaře ukázal, že inteligentní roboti mění pravidla hry ve výzkumu chování hmyzu a ekologie. Projekt bude dokončen příští rok a jistě přinese ještě řadu důležitých zjištění jak o možnostech využití robotických systémů využívajících umělou inteligenci, tak i o samotném dění ve včelstvech.
Odkaz na videozáznam z projektu:
https://www.youtube.com/playlist?list=PLwJcdKVRxEGLCrmPlRZjI0PEkswdf8O9g
Zdroje:
1. Ulrich et al. 2024. Autonomous tracking of honeybee behaviors over long-term periods with cooperating robots. Science Robotics. https://www.science.org/doi/10.1126/scirobotics.adn6848
2. Tisková zpráva ČVUT:
3. Použité fotografie © H2020 FET-Open RoboRoyale https://drive.google.com/drive/folders/1lflOicQJ8nSQpC-l_bV5z1EFk-PoZBy_?usp=shari
Poznámka: Redakce Moderního včelaře děkuje doc. Ing. Tomáši Krajníkovi, Ph.D., z Centra umělé inteligence Fakulty elektrotechnické Českého vysokého učení technického v Praze za doplnění reálií v tomto článku nad rámec tiskové zprávy. Především pak za uvolnění videí z projektu, které si můžete prohlédnout na www.modernivcelar.eu v Moderním včelaři 12/2024 jako součást tohoto článku.
Doc. Ing. Tomáš Krajník, Ph.D.,bude hostem cyklu Se včelami na kafi 9. 1. 2025 od 18 hodin v Kulturní kavárně v Blatné. Podrobnosti v Kalendáriu tohoto čísla Moderního včelaře.